
Every physics major at some point in their undergraduate career takes a course in thermodynamics and statistical mechanics. One of my problem sets included a problem that considers an Einstein solid with 50 oscillators and 100 units of energy and then increases the number of oscillators to 5000. I will be presenting my solution to the numerical side of the problem. An Einstein solid can be regarded as
“… a collection of microscopic systems which can store any number of energy ‘units’ of equal size which occur for any quantum-mechanical harmonic oscillator whose potential energy function has the form
…The model of a solid as a collection of identical oscillators with quantized energy units…”
described (defined) by Schroeder in his text Introduction to Thermal Physics. Figure 1 represents the Einstein solid as a whole (in a lattice) and Figure 2 depicts the quantum-mechanical harmonic oscillator interpretation of an Einstein solid.
The problem statement is:
“Use a computer to study the entropy, temperature, and heat capacity of an Einstein solid, as follows. Let the solid contain 50 oscillators (initially), and from 0 to 100 units of energy. Make a table, analogous to Table 3.2, in which each row represents a different value for the energy…Make a graph of entropy vs. energy, and a graph of the heat capacity vs. temperature. Then change the number of oscillators to 5000, and again make a graph of the heat capacity and temperature and entropy and energy, and discuss the predictions and compare it to the predictions to the data for lead, aluminum, and diamond. Estimate the numerical value of
for each of those solids.”
This problem can be found in the aforementioned text.
Figure 1. Einstein Solid (Lattice); Image Credit/Obtained from https://mappingignorance.org/2015/12/17/einstein-and-quantum-solids/

Figure 2. Quantum-Mechanical Harmonic Oscillator interpretation of an Einstein solid as a collection of these oscillators. Image Credit: http://hyperphysics.phy-astr.gsu.edu/hbase/Therm/einsol.html
Part I: Let 

and

where 

and

where 


where 



Table I (Dimensionless Parameters):
| Energy q | Ω | S/k | kT/ε | C/Nk |
| 0 | 1 | 0 | 0 | N/A |
| 1 | 50 | 3.912023005 | 0.27969284 | 0.121826198 |
| 2 | 1275 | 7.150701458 | 0.328336604 | 0.453606383 |
| 3 | 22100 | 10.00333289 | 0.367875021 | 0.536183525 |
| 4 | 292825 | 12.58733044 | 0.402937926 | 0.593741905 |
| 5 | 3162510 | 14.96687657 | 0.43524436 | 0.637773801 |
| 6 | 28989675 | 17.18245029 | 0.465656087 | 0.673043377 |
| 7 | 231917400 | 19.26189183 | 0.494675894 | 0.702124659 |
| 8 | 1652411475 | 21.22550156 | 0.522626028 | 0.72660015 |
| 9 | 10648873950 | 23.08871999 | 0.549726805 | 0.747522024 |
| 10 | 62828356305 | 24.86367234 | 0.576136157 | 0.765628174 |
| 11 | 3.427E+11 | 26.56012163 | 0.601971486 | 0.781456694 |
| 12 | 1.74206E+12 | 28.18608885 | 0.627322615 | 0.795411957 |
| 13 | 8.30828E+12 | 29.74827387 | 0.652259893 | 0.807805226 |
| 14 | 3.73873E+13 | 31.25235127 | 0.676839501 | 0.818880855 |
| 15 | 1.59519E+14 | 32.70318415 | 0.701107048 | 0.828833859 |
| 16 | 6.48046E+14 | 34.1049827 | 0.725100078 | 0.837822083 |
| 17 | 2.51594E+15 | 35.4614241 | 0.748849881 | 0.845974847 |
| 18 | 9.3649E+15 | 36.77574496 | 0.772382808 | 0.853399232 |
| 19 | 3.35165E+16 | 38.05081369 | 0.795721261 | 0.860184741 |
| 20 | 1.15632E+17 | 39.28918792 | 0.818884446 | 0.866406816 |
| 21 | 3.8544E+17 | 40.49316072 | 0.84188895 | 0.872129523 |
| 22 | 1.24392E+18 | 41.66479814 | 0.864749193 | 0.877407641 |
| 23 | 3.89401E+18 | 42.80597005 | 0.887477794 | 0.882288296 |
| 24 | 1.18443E+19 | 43.91837566 | 0.910085848 | 0.88681226 |
| 25 | 3.5059E+19 | 45.00356493 | 0.932583169 | 0.891014994 |
| 26 | 1.01132E+20 | 46.0629565 | 0.954978471 | 0.89492748 |
| 27 | 2.84667E+20 | 47.09785298 | 0.977279528 | 0.898576916 |
| 28 | 7.82835E+20 | 48.10945389 | 0.999493303 | 0.901987268 |
| 29 | 2.10556E+21 | 49.09886689 | 1.021626052 | 0.905179739 |
| 30 | 5.54463E+21 | 50.06711736 | 1.043683421 | 0.908173155 |
| 31 | 1.43087E+22 | 51.01515679 | 1.065670516 | 0.910984284 |
| 32 | 3.6219E+22 | 51.94387004 | 1.087591972 | 0.913628113 |
| 33 | 8.99987E+22 | 52.85408172 | 1.109452006 | 0.916118071 |
| 34 | 2.19703E+23 | 53.74656181 | 1.131254467 | 0.918466228 |
| 35 | 5.27286E+23 | 54.62203054 | 1.153002873 | 0.920683463 |
| 36 | 1.24498E+24 | 55.48116286 | 1.174700452 | 0.9227796 |
| 37 | 2.89374E+24 | 56.32459225 | 1.196350168 | 0.924763536 |
| 38 | 6.62514E+24 | 57.1529142 | 1.217954752 | 0.926643346 |
| 39 | 1.4949E+25 | 57.96668937 | 1.239516722 | 0.928426373 |
| 40 | 3.32616E+25 | 58.76644629 | 1.261038406 | 0.930119309 |
| 41 | 7.30133E+25 | 59.55268389 | 1.282521958 | 0.931728264 |
| 42 | 1.58195E+26 | 60.32587378 | 1.303969378 | 0.933258829 |
| 43 | 3.38465E+26 | 61.08646224 | 1.325382522 | 0.934716125 |
| 44 | 7.15391E+26 | 61.8348721 | 1.346763119 | 0.936104855 |
| 45 | 1.49437E+27 | 62.57150439 | 1.368112778 | 0.937429341 |
| 46 | 3.08621E+27 | 63.29673989 | 1.389433002 | 0.938693566 |
| 47 | 6.30374E+27 | 64.01094048 | 1.410725193 | 0.9399012 |
| 48 | 1.27388E+28 | 64.71445045 | 1.431990666 | 0.941055635 |
| 49 | 2.54776E+28 | 65.40759763 | 1.45323065 | 0.942160007 |
| 50 | 5.04457E+28 | 66.09069447 | 1.4744463 | 0.943217222 |
| 51 | 9.89131E+28 | 66.76403902 | 1.495638697 | 0.944229971 |
| 52 | 1.9212E+29 | 67.42791582 | 1.516808861 | 0.945200757 |
| 53 | 3.6974E+29 | 68.08259672 | 1.537957749 | 0.946131903 |
| 54 | 7.05244E+29 | 68.72834166 | 1.559086264 | 0.947025573 |
| 55 | 1.33355E+30 | 69.36539938 | 1.580195257 | 0.947883783 |
| 56 | 2.50041E+30 | 69.99400804 | 1.60128553 | 0.948708411 |
| 57 | 4.64989E+30 | 70.61439586 | 1.622357843 | 0.949501213 |
| 58 | 8.57824E+30 | 71.22678169 | 1.643412912 | 0.95026383 |
| 59 | 1.57025E+31 | 71.83137547 | 1.664451416 | 0.950997796 |
| 60 | 2.85263E+31 | 72.42837879 | 1.685473998 | 0.951704548 |
| 61 | 5.14408E+31 | 73.01798529 | 1.706481267 | 0.952385432 |
| 62 | 9.20957E+31 | 73.60038111 | 1.7274738 | 0.953041713 |
| 63 | 1.63726E+32 | 74.17574525 | 1.748452147 | 0.953674575 |
| 64 | 2.89078E+32 | 74.74424999 | 1.769416829 | 0.954285135 |
| 65 | 5.06999E+32 | 75.30606117 | 1.79036834 | 0.95487444 |
| 66 | 8.83407E+32 | 75.86133855 | 1.811307153 | 0.955443478 |
| 67 | 1.52948E+33 | 76.41023613 | 1.832233716 | 0.955993177 |
| 68 | 2.63161E+33 | 76.95290236 | 1.853148456 | 0.956524415 |
| 69 | 4.50043E+33 | 77.48948048 | 1.874051781 | 0.957038017 |
| 70 | 7.65073E+33 | 78.02010873 | 1.894944079 | 0.957534764 |
| 71 | 1.29308E+34 | 78.54492059 | 1.915825721 | 0.958015394 |
| 72 | 2.17309E+34 | 79.06404502 | 1.936697061 | 0.958480604 |
| 73 | 3.63175E+34 | 79.57760662 | 1.957558438 | 0.958931052 |
| 74 | 6.03655E+34 | 80.08572588 | 1.978410175 | 0.959367363 |
| 75 | 9.98043E+34 | 80.58851934 | 1.999252581 | 0.959790129 |
| 76 | 1.64152E+35 | 81.08609973 | 2.020085953 | 0.960199908 |
| 77 | 2.68612E+35 | 81.57857622 | 2.040910573 | 0.960597234 |
| 78 | 4.37356E+35 | 82.06605448 | 2.061726714 | 0.960982609 |
| 79 | 7.08627E+35 | 82.54863689 | 2.082534635 | 0.961356514 |
| 80 | 1.14266E+36 | 83.02642266 | 2.103334587 | 0.961719401 |
| 81 | 1.8339E+36 | 83.49950796 | 2.124126809 | 0.962071705 |
| 82 | 2.92977E+36 | 83.96798603 | 2.14491153 | 0.962413835 |
| 83 | 4.65939E+36 | 84.43194735 | 2.165688971 | 0.962746183 |
| 84 | 7.37736E+36 | 84.89147968 | 2.186459344 | 0.963069122 |
| 85 | 1.16302E+37 | 85.34666822 | 2.207222854 | 0.963383006 |
| 86 | 1.82567E+37 | 85.7975957 | 2.227979695 | 0.963688173 |
| 87 | 2.85392E+37 | 86.24434247 | 2.248730056 | 0.963984945 |
| 88 | 4.44304E+37 | 86.68698658 | 2.269474119 | 0.964273631 |
| 89 | 6.8892E+37 | 87.12560389 | 2.290212057 | 0.964554522 |
| 90 | 1.064E+38 | 87.56026816 | 2.31094404 | 0.9648279 |
| 91 | 1.63692E+38 | 87.99105107 | 2.331670228 | 0.965094032 |
| 92 | 2.50876E+38 | 88.41802239 | 2.352390779 | 0.965353173 |
| 93 | 3.83058E+38 | 88.84124995 | 2.373105841 | 0.965605568 |
| 94 | 5.82737E+38 | 89.2607998 | 2.39381556 | 0.965851451 |
| 95 | 8.83307E+38 | 89.67673621 | 2.414520077 | 0.966091045 |
| 96 | 1.33416E+39 | 90.08912176 | 2.435219526 | 0.966324564 |
| 97 | 2.00812E+39 | 90.4980174 | 2.455914037 | 0.966552213 |
| 98 | 3.01218E+39 | 90.90348251 | 2.476603736 | 0.966774189 |
| 99 | 4.50306E+39 | 91.30557493 | 2.497288745 | 1.287457337 |
| 100 | 6.70955E+39 | 91.70435105 | 2.507672727 | 1.926043463 |
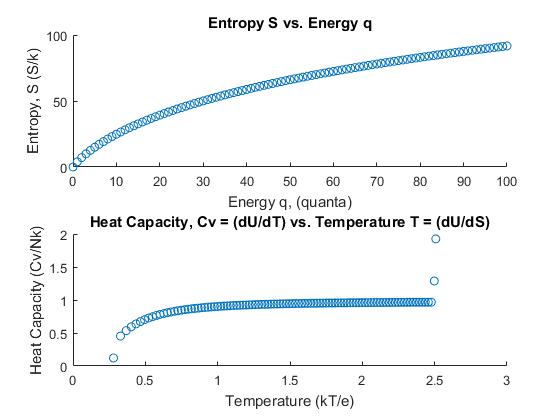
Graphing the entropy vs. energy, and the heat capacity vs. temperature gives the following:
Graphs I & II
Part II: Let 
Table II (Dimensionless Parameters):
| Energy q | Ω | S/k | kT/ε | C/Nk |
| 0 | 1 | 0 | 0 | N/A |
| 1 | 5000 | 8.517193 | 0.122388 | 0.003049 |
| 2 | 12502500 | 16.34144 | 0.131206 | 0.026553 |
| 3 | 2.08E+10 | 23.76042 | 0.137453 | 0.035575 |
| 4 | 2.61E+13 | 30.89192 | 0.14245 | 0.043342 |
| 5 | 2.61E+16 | 37.80047 | 0.146681 | 0.050387 |
| 6 | 2.18E+19 | 44.52691 | 0.150388 | 0.056922 |
| 7 | 1.56E+22 | 51.09939 | 0.153709 | 0.063064 |
| 8 | 9.74E+24 | 57.53854 | 0.156731 | 0.068885 |
| 9 | 5.42E+27 | 63.86011 | 0.159515 | 0.074436 |
| 10 | 2.72E+30 | 70.07651 | 0.162105 | 0.079755 |
| 11 | 1.24E+33 | 76.19781 | 0.164531 | 0.08487 |
| 12 | 5.16E+35 | 82.23229 | 0.166818 | 0.089804 |
| 13 | 1.99E+38 | 88.18693 | 0.168985 | 0.094575 |
| 14 | 7.13E+40 | 94.06767 | 0.171047 | 0.099198 |
| 15 | 2.38E+43 | 99.87961 | 0.173017 | 0.103687 |
| 16 | 7.47E+45 | 105.6272 | 0.174905 | 0.108052 |
| 17 | 2.2E+48 | 111.3144 | 0.176719 | 0.112303 |
| 18 | 6.14E+50 | 116.9446 | 0.178467 | 0.116448 |
| 19 | 1.62E+53 | 122.5209 | 0.180154 | 0.120494 |
| 20 | 4.07E+55 | 128.0462 | 0.181787 | 0.124447 |
| 21 | 9.73E+57 | 133.5229 | 0.183368 | 0.128314 |
| 22 | 2.22E+60 | 138.9532 | 0.184904 | 0.132098 |
| 23 | 4.85E+62 | 144.3393 | 0.186396 | 0.135806 |
| 24 | 1.02E+65 | 149.683 | 0.187849 | 0.13944 |
| 25 | 2.04E+67 | 154.9861 | 0.189265 | 0.143004 |
| 26 | 3.94E+69 | 160.2502 | 0.190646 | 0.146503 |
| 27 | 7.34E+71 | 165.4768 | 0.191995 | 0.149939 |
| 28 | 1.32E+74 | 170.6671 | 0.193314 | 0.153316 |
| 29 | 2.28E+76 | 175.8226 | 0.194604 | 0.156635 |
| 30 | 3.83E+78 | 180.9444 | 0.195868 | 0.159899 |
| 31 | 6.21E+80 | 186.0336 | 0.197106 | 0.16311 |
| 32 | 9.77E+82 | 191.0912 | 0.19832 | 0.166272 |
| 33 | 1.49E+85 | 196.1183 | 0.199512 | 0.169384 |
| 34 | 2.21E+87 | 201.1157 | 0.200682 | 0.172451 |
| 35 | 3.17E+89 | 206.0843 | 0.201831 | 0.175472 |
| 36 | 4.44E+91 | 211.025 | 0.202961 | 0.17845 |
| 37 | 6.04E+93 | 215.9384 | 0.204073 | 0.181387 |
| 38 | 8E+95 | 220.8254 | 0.205166 | 0.184283 |
| 39 | 1.03E+98 | 225.6866 | 0.206243 | 0.18714 |
| 40 | 1.3E+100 | 230.5227 | 0.207304 | 0.18996 |
| 41 | 1.6E+102 | 235.3343 | 0.208349 | 0.192743 |
| 42 | 1.9E+104 | 240.122 | 0.209379 | 0.195491 |
| 43 | 2.3E+106 | 244.8863 | 0.210395 | 0.198205 |
| 44 | 2.6E+108 | 249.6279 | 0.211397 | 0.200885 |
| 45 | 2.9E+110 | 254.3472 | 0.212386 | 0.203533 |
| 46 | 3.2E+112 | 259.0447 | 0.213363 | 0.20615 |
| 47 | 3.4E+114 | 263.7209 | 0.214327 | 0.208736 |
| 48 | 3.6E+116 | 268.3762 | 0.215279 | 0.211293 |
| 49 | 3.7E+118 | 273.0112 | 0.21622 | 0.213821 |
| 50 | 3.7E+120 | 277.6261 | 0.21715 | 0.21632 |
| 51 | 3.7E+122 | 282.2214 | 0.218069 | 0.218793 |
| 52 | 3.6E+124 | 286.7975 | 0.218978 | 0.221238 |
| 53 | 3.4E+126 | 291.3548 | 0.219877 | 0.223658 |
| 54 | 3.2E+128 | 295.8935 | 0.220766 | 0.226052 |
| 55 | 2.9E+130 | 300.4141 | 0.221646 | 0.228422 |
| 56 | 2.7E+132 | 304.9169 | 0.222517 | 0.230768 |
| 57 | 2.4E+134 | 309.4022 | 0.22338 | 0.23309 |
| 58 | 2.1E+136 | 313.8703 | 0.224233 | 0.235388 |
| 59 | 1.8E+138 | 318.3214 | 0.225079 | 0.237665 |
| 60 | 1.5E+140 | 322.756 | 0.225917 | 0.239919 |
| 61 | 1.2E+142 | 327.1743 | 0.226746 | 0.242152 |
| 62 | 1E+144 | 331.5765 | 0.227568 | 0.244363 |
| 63 | 8.1E+145 | 335.9628 | 0.228383 | 0.246555 |
| 64 | 6.4E+147 | 340.3337 | 0.229191 | 0.248725 |
| 65 | 5E+149 | 344.6892 | 0.229991 | 0.250876 |
| 66 | 3.8E+151 | 349.0296 | 0.230785 | 0.253008 |
| 67 | 2.9E+153 | 353.3553 | 0.231572 | 0.255121 |
| 68 | 2.2E+155 | 357.6663 | 0.232353 | 0.257215 |
| 69 | 1.6E+157 | 361.9629 | 0.233127 | 0.259291 |
| 70 | 1.1E+159 | 366.2453 | 0.233896 | 0.261349 |
| 71 | 8.2E+160 | 370.5137 | 0.234658 | 0.263389 |
| 72 | 5.8E+162 | 374.7683 | 0.235414 | 0.265413 |
| 73 | 4E+164 | 379.0093 | 0.236165 | 0.267419 |
| 74 | 2.7E+166 | 383.237 | 0.23691 | 0.269409 |
| 75 | 1.9E+168 | 387.4514 | 0.23765 | 0.271382 |
| 76 | 1.2E+170 | 391.6527 | 0.238384 | 0.273339 |
| 77 | 8.2E+171 | 395.8412 | 0.239113 | 0.275281 |
| 78 | 5.3E+173 | 400.0169 | 0.239837 | 0.277207 |
| 79 | 3.4E+175 | 404.1802 | 0.240556 | 0.279118 |
| 80 | 2.2E+177 | 408.331 | 0.24127 | 0.281015 |
| 81 | 1.4E+179 | 412.4696 | 0.24198 | 0.282896 |
| 82 | 8.4E+180 | 416.5962 | 0.242684 | 0.284763 |
| 83 | 5.2E+182 | 420.7108 | 0.243384 | 0.286616 |
| 84 | 3.1E+184 | 424.8136 | 0.24408 | 0.288455 |
| 85 | 1.9E+186 | 428.9048 | 0.244771 | 0.29028 |
| 86 | 1.1E+188 | 432.9845 | 0.245458 | 0.292092 |
| 87 | 6.5E+189 | 437.0529 | 0.24614 | 0.29389 |
| 88 | 3.7E+191 | 441.11 | 0.246819 | 0.295676 |
| 89 | 2.1E+193 | 445.156 | 0.247493 | 0.297448 |
| 90 | 1.2E+195 | 449.191 | 0.248164 | 0.299208 |
| 91 | 6.7E+196 | 453.2152 | 0.24883 | 0.300955 |
| 92 | 3.7E+198 | 457.2286 | 0.249493 | 0.30269 |
| 93 | 2E+200 | 461.2315 | 0.250152 | 0.304413 |
| 94 | 1.1E+202 | 465.2238 | 0.250807 | 0.306124 |
| 95 | 5.9E+203 | 469.2057 | 0.251458 | 0.307823 |
| 96 | 3.2E+205 | 473.1774 | 0.252106 | 0.30951 |
| 97 | 1.7E+207 | 477.1389 | 0.252751 | 0.311187 |
| 98 | 8.6E+208 | 481.0903 | 0.253392 | 0.312851 |
| 99 | 4.4E+210 | 485.0318 | 0.254029 | 0.418439 |
| 100 | 2.3E+212 | 488.9634 | 0.254345 | 0.628243 |
Thus the graphs of the entropy vs. energy and heat capacity vs. temperature follow:
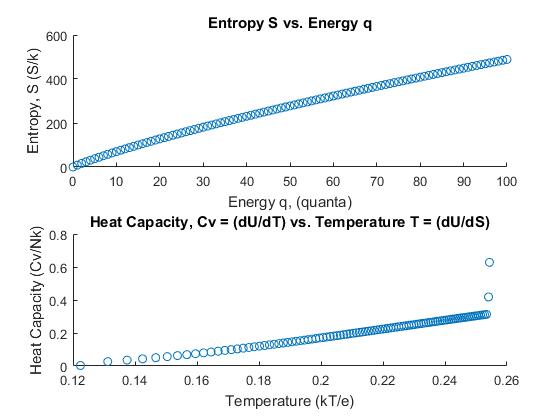
Figure 2. Graphs III and IV.
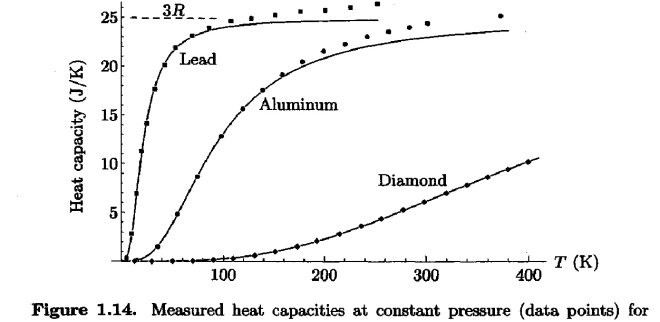
Figure 3. (Figure 1.14 of Schroeder’s Thermal Physics) Heat Capacity curves for Lead (Pb), Aluminum (Al), and Diamond, respectively as a function of temperature in Kelvin.
Graph II shows the prediction for heat capacity as a function of temperature of an Einstein solid for which there are 100 units of energy and 50 oscillators. The data exhibits a trend that appears to reach an asymptote quickly, then when the temperature reaches T ≈ 2.5, there is a sudden increase in the value of the heat capacity. The approach to determining the final data points was switched from a central difference approximation to a backward difference approximation of the last two entries corresponding to energies q = 99 and q = 100 units. If we ignore the last two, the curve approaches an asymptote at CV = 1. However, the graphs produced are of the dimensionless quantities involved. The overall curve appears to be logarithmic and resembles the heat capacity curve for lead. The initial increase is almost immediate and its slope appears to be slightly less than lead but greater than aluminum.
Graphs III and IV show the prediction for heat capacity in terms of temperature of an Einstein solid for which the energy is the same, but the number of oscillators is now 5000. The temperature has been reduced and the heat capacity vs. temperature yields a graph that shows a trendline that appears linear. Comparing to Figure 3(Fig. 1.14 in the text), this graph resembles the heat capacity curve for diamond. In Figure 3, the diamond curve is linear throughout. The only discrepancies among Graph IV and Figure 3 are the final two data points in Graph IV. Again, a backward difference approximation was used to determine the final data points for this Einstein solid as well. The value for the constant ε was determined by finding the quotient of the entropy and temperature columns and taking the average value of ε for each energy.
This was the numerical analysis of an Einstein solid’s temperature, energy, entropy, and heat capacity. In the next post, I shall discuss the analytical version of this analysis.


 has finite support and also satisfies the PDE
has finite support and also satisfies the PDE





 . This means that
. This means that
 does satisfy the given PDE (Eq.(2)).
does satisfy the given PDE (Eq.(2)).

 :
:

 . Therefore, if we consider the following differences…
. Therefore, if we consider the following differences…




 represents the quadratic, cubic, quartic,quintic,etc. terms. One can use similar logic to derive the second-order finite-difference equations.
represents the quadratic, cubic, quartic,quintic,etc. terms. One can use similar logic to derive the second-order finite-difference equations.

 :
:
 so as not to confuse it with the notation for an ordinary derivative. Recall the Navier-Stokes’ equation and the vorticity equation
so as not to confuse it with the notation for an ordinary derivative. Recall the Navier-Stokes’ equation and the vorticity equation

 and let
and let  and
and  . Then,
. Then,



 multiplied by a volume element
multiplied by a volume element  given by
given by
 , the total derivative becomes an ordinary time derivative. Thus, Eq.(10) becomes
, the total derivative becomes an ordinary time derivative. Thus, Eq.(10) becomes![\displaystyle \int_{V_{\omega}}\frac{d}{dt}(\textbf{u}\cdot \omega)dV=\iint_{S_{\omega}}\bigg\{\nabla \cdot [-\frac{P}{\rho}\omega + \frac{u^{2}}{2}\omega ]\bigg\}\cdot d\textbf{S}=0. (11)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_%7BV_%7B%5Comega%7D%7D%5Cfrac%7Bd%7D%7Bdt%7D%28%5Ctextbf%7Bu%7D%5Ccdot+%5Comega%29dV%3D%5Ciint_%7BS_%7B%5Comega%7D%7D%5Cbigg%5C%7B%5Cnabla+%5Ccdot+%5B-%5Cfrac%7BP%7D%7B%5Crho%7D%5Comega+%2B+%5Cfrac%7Bu%5E%7B2%7D%7D%7B2%7D%5Comega+%5D%5Cbigg%5C%7D%5Ccdot+d%5Ctextbf%7BS%7D%3D0.+%2811%29&bg=ffffff&fg=333333&s=0&c=20201002)

 is the magnetic vector potential which is described by the following relations
is the magnetic vector potential which is described by the following relations


![y\in [0,x]](https://s0.wp.com/latex.php?latex=y%5Cin+%5B0%2Cx%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The first term of the integrand
. The first term of the integrand  denotes the kernel. The kernel of the integral arises from its conversion from an initial value problem. Indeed, solving the integral equation is equivalent to solving the initial value problem of a differential equation. The integral equation includes the initial conditions instead of being added in near the end of the solution of an IVP.
denotes the kernel. The kernel of the integral arises from its conversion from an initial value problem. Indeed, solving the integral equation is equivalent to solving the initial value problem of a differential equation. The integral equation includes the initial conditions instead of being added in near the end of the solution of an IVP.
 Then the next iteration of
Then the next iteration of  is
is
 is
is


 is determined, we may determine the exact solution
is determined, we may determine the exact solution  via
via
 . From the theorem it is known that the flux of the associated magnetic field is linked with surface
. From the theorem it is known that the flux of the associated magnetic field is linked with surface 
 , the elements of plasma contained within
, the elements of plasma contained within  . The magnetic flux, linked to
. The magnetic flux, linked to 



 Additionally, if we imagine a cylinder formed by projecting a circular cross-section from one surface to the other, we may consider its length to be
Additionally, if we imagine a cylinder formed by projecting a circular cross-section from one surface to the other, we may consider its length to be  with area given by the cross product:
with area given by the cross product:  . Moreover, since we know that the area of integration is a closed region we see that the integral vanishes (goes to 0). Thus, we may write the difference
. Moreover, since we know that the area of integration is a closed region we see that the integral vanishes (goes to 0). Thus, we may write the difference


 ) vanish and recall Stokes’ theorem
) vanish and recall Stokes’ theorem



 describes the order zero of Bessel’s equation. I shall be making use of the assumption
describes the order zero of Bessel’s equation. I shall be making use of the assumption




 and
and  , we get the following
, we get the following![\displaystyle a_{0}\bigg\{r(r-1)+r\bigg\}x^{r}+a_{1}\bigg\{(1+r)r+(1+r)\bigg\}x^{r+1}+\sum_{j=2}^{\infty}\bigg\{[(j+r)(j+r-1)+(j+r)]a_{j}+a_{j-2}\bigg\}x^{j+r}=0, (7)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+a_%7B0%7D%5Cbigg%5C%7Br%28r-1%29%2Br%5Cbigg%5C%7Dx%5E%7Br%7D%2Ba_%7B1%7D%5Cbigg%5C%7B%281%2Br%29r%2B%281%2Br%29%5Cbigg%5C%7Dx%5E%7Br%2B1%7D%2B%5Csum_%7Bj%3D2%7D%5E%7B%5Cinfty%7D%5Cbigg%5C%7B%5B%28j%2Br%29%28j%2Br-1%29%2B%28j%2Br%29%5Da_%7Bj%7D%2Ba_%7Bj-2%7D%5Cbigg%5C%7Dx%5E%7Bj%2Br%7D%3D0%2C+%287%29&bg=ffffff&fg=333333&s=0&c=20201002)
 and I have shifted the indices downward by 2. Consider now the indicial equation (coefficients of
and I have shifted the indices downward by 2. Consider now the indicial equation (coefficients of  ),
),
 . We may determine the recurrence relation from summation terms from which we get
. We may determine the recurrence relation from summation terms from which we get![\displaystyle a_{j}(r)=\frac{-a_{j-2}(r)}{[(j+r)(j+r-1)+(j+r)]}=\frac{-a_{j-2}(r)}{(j+r)^{2}}. (9)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+a_%7Bj%7D%28r%29%3D%5Cfrac%7B-a_%7Bj-2%7D%28r%29%7D%7B%5B%28j%2Br%29%28j%2Br-1%29%2B%28j%2Br%29%5D%7D%3D%5Cfrac%7B-a_%7Bj-2%7D%28r%29%7D%7B%28j%2Br%29%5E%7B2%7D%7D.+%289%29&bg=ffffff&fg=333333&s=0&c=20201002)
 we let
we let  in which case the recurrence relation becomes
in which case the recurrence relation becomes
 . Thus we have
. Thus we have
 . So, the successive terms are
. So, the successive terms are  . Let
. Let  , where
, where  , then the recurrence relation is again modified to
, then the recurrence relation is again modified to
 , one finds the expression
, one finds the expression



 , then the conjugate vector takes the form
, then the conjugate vector takes the form



 . Therefore we can write any arbitrary vector in the following way
. Therefore we can write any arbitrary vector in the following way

 represent the outer product which may also be written in component form as
represent the outer product which may also be written in component form as  . We therefore have the condition that
. We therefore have the condition that

 . The first relation represents the completeness of an orthonormal set of basis vectors and the second is its modified form.
. The first relation represents the completeness of an orthonormal set of basis vectors and the second is its modified form.

 .
.
 represent the typical fluid velocity, length scale and typical volume respectively. The magnetic Reynolds number is the ratio between the advective and diffusive terms of the induction equation. There are two canoncial regimes: (1)
represent the typical fluid velocity, length scale and typical volume respectively. The magnetic Reynolds number is the ratio between the advective and diffusive terms of the induction equation. There are two canoncial regimes: (1)  , and (2)
, and (2) The former is sometimes called the diffusive limit and the latter is called either the Ideal limit or the infinite conductivity limit (I prefer to call it the ideal limit, since the terms infinite conductivity limit is not quite accurate).
The former is sometimes called the diffusive limit and the latter is called either the Ideal limit or the infinite conductivity limit (I prefer to call it the ideal limit, since the terms infinite conductivity limit is not quite accurate).
 ) then we can use the aforementioned vector identity to write the induction equation as
) then we can use the aforementioned vector identity to write the induction equation as

 , in which case
, in which case
 ) we may define the circulation as being
) we may define the circulation as being
 , according to this theorem it states that this fluid element will continue to lie on that vortex line indefinitely.
, according to this theorem it states that this fluid element will continue to lie on that vortex line indefinitely.
