
SOURCE FOR CONTENT: Neuenschwander, D.E., 2015. Tensor Calculus for Physics. Johns Hopkins University Press. Ch.1
In the preceding post of this series, we saw how we may define a vector in the traditional sense. There is another formulation which is the focus of this post. One becomes familiar with this formulation typically in a second course in quantum mechanics or of a similar form in an introductory linear algebra course.
A vector may be written in two forms: a ket vector,

or a bra vector (conjugate vector):

Additionally, if 

In words, if the conjugate vector exists in the complex plane, we may express such a vector in terms of complex conjugates of the components.
We may form the inner product by the following

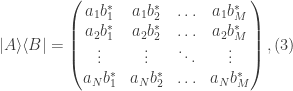
Conversely we may form the outer product as follows
Additionally, one typically defines a vector as a linear combination of basis vectors which we shall express by the following:


where in general the basis vectors satisfy 

Moreover, any conjugate vector may be written as

Let 


and

wherein 
The next post will discuss the transformations of coordinates of vectors using both the matrix formulation and using partial derivatives.
