SOURCE FOR CONTENT:
Priest, E. Magnetohydrodynamics of the Sun, 2014. Cambridge University Press. Ch.2.;
Davidson, P.A., 2001. An Introduction to Magnetohydrodynamics. Ch.4.
We have seen how to derive the induction equation from Maxwell’s equations assuming no charge and assuming that the plasma velocity is non-relativistic. Thus, we have the induction equation as being

Many texts in MHD make the comparison of the induction equation to the vorticity equation

where I have made use of the vector identity
 .
.
Indeed, if we do compare the induction equation (Eq.(1)) to the vorticity equation (Eq.(2)) we easily see the resemblance between the two. The first term on the right hand side of Eq.(1)/ Eq.(2) determines the advection of magnetic field lines/vortex field lines; the second term on the right hand side deals with the diffusion of the magnetic field lines/vortex field lines.
From this, we can impose restrictions and thus look at the consequences of the induction equation (since it governs the evolution of the magnetic field). Furthermore, we see that we can modify the kinematic theorems of classical vortex dynamics to describe the properties of magnetic field lines. After discussing the direct consequences of the induction equation, I will discuss a few theorems of vortex dynamics and then introduce their MHD analogue.
Inherent to this is magnetic Reynold’s number. In geophysical fluid dynamics, the Reynolds number (not the magnetic Reynolds number) is a ratio between the viscous forces per volume and the inertial forces per volume given by

where  represent the typical fluid velocity, length scale and typical volume respectively. The magnetic Reynolds number is the ratio between the advective and diffusive terms of the induction equation. There are two canoncial regimes: (1)
represent the typical fluid velocity, length scale and typical volume respectively. The magnetic Reynolds number is the ratio between the advective and diffusive terms of the induction equation. There are two canoncial regimes: (1)  , and (2)
, and (2) The former is sometimes called the diffusive limit and the latter is called either the Ideal limit or the infinite conductivity limit (I prefer to call it the ideal limit, since the terms infinite conductivity limit is not quite accurate).
The former is sometimes called the diffusive limit and the latter is called either the Ideal limit or the infinite conductivity limit (I prefer to call it the ideal limit, since the terms infinite conductivity limit is not quite accurate).
Case I:
Consider again the induction equation

If we then assume that we are dealing with incompressible flows (i.e.  ) then we can use the aforementioned vector identity to write the induction equation as
) then we can use the aforementioned vector identity to write the induction equation as

In the regime for which , the induction equation for incompressible flows (Eq.(4)) assumes the form
Compare this now to the following equation,
We see that the magnetic field lines are diffused through the plasma.
Case II:
If we now consider the case for which the advective term dominates, we see that the induction equation takes the form

Mathematically, what this suggests is that the magnetic field lines become “frozen-in” the plasma, giving rise to Alfven’s theorem of flux freezing.
Many astrophysical systems require a high magnetic Reynolds number. Such systems include the solar magnetic field (heliospheric current sheet), planetary dynamos (Earth, Jupiter, and Saturn), and galactic magnetic fields.
Kelvin’s Theorem & Helmholtz’s Theorem:
Kelvin’s Theorem: Consider a vortex tube in which we have that  , in which case
, in which case

and consider also the curve taken around a closed surface, (we call this curve a material curve  ) we may define the circulation as being
) we may define the circulation as being
Thus, Kelvin’s theorem states that if the material curve is closed and it consists of identical fluid particles then the circulation, given by Eq.(9), is temporally invariant.
Helmholtz’s Theorem:
Part I: Suppose we consider a fluid element which lies on a vortex line at some initial time  , according to this theorem it states that this fluid element will continue to lie on that vortex line indefinitely.
, according to this theorem it states that this fluid element will continue to lie on that vortex line indefinitely.
Part II: This part says that the flux of vorticity

remains constant for each cross-sectional area and is also invariant with respect to time.
Now the magnetic analogue of Helmholtz’s Theorems are found to be Alfven’s theorem of flux freezing and conservation of magnetic flux, magnetic field lines, and magnetic topology.
The first says that fluid elements which lie along magnetic field lines will continue to do so indefinitely; basically the same for the first Helmholtz theorem.
The second requires a more detailed argument to demonstrate why it works but it says that the magnetic flux through the plasma remains constant. The third says that magnetic field lines, hence the magnetic structure may be stretched and deformed in many ways, but the magnetic topology overall remains the same.
The justification for these last two require some proof-like arguments and I will leave that to another post.
In my project, I considered the case of high magnetic Reynolds number in order to examine the MHD processes present in region of metallic hydrogen present in Jupiter’s interior.
In the next post, I will “prove” the theorems I mention and discuss the project.


















![\displaystyle \int_{V_{\omega}}\frac{d}{dt}(\textbf{u}\cdot \omega)dV=\iint_{S_{\omega}}\bigg\{\nabla \cdot [-\frac{P}{\rho}\omega + \frac{u^{2}}{2}\omega ]\bigg\}\cdot d\textbf{S}=0. (11)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_%7BV_%7B%5Comega%7D%7D%5Cfrac%7Bd%7D%7Bdt%7D%28%5Ctextbf%7Bu%7D%5Ccdot+%5Comega%29dV%3D%5Ciint_%7BS_%7B%5Comega%7D%7D%5Cbigg%5C%7B%5Cnabla+%5Ccdot+%5B-%5Cfrac%7BP%7D%7B%5Crho%7D%5Comega+%2B+%5Cfrac%7Bu%5E%7B2%7D%7D%7B2%7D%5Comega+%5D%5Cbigg%5C%7D%5Ccdot+d%5Ctextbf%7BS%7D%3D0.+%2811%29&bg=ffffff&fg=333333&s=0&c=20201002)




 located within a plasma at some initial time
located within a plasma at some initial time  . From the theorem it is known that the flux of the associated magnetic field is linked with surface
. From the theorem it is known that the flux of the associated magnetic field is linked with surface 
 , the elements of plasma contained within
, the elements of plasma contained within  . The magnetic flux, linked to
. The magnetic flux, linked to 



 Additionally, if we imagine a cylinder formed by projecting a circular cross-section from one surface to the other, we may consider its length to be
Additionally, if we imagine a cylinder formed by projecting a circular cross-section from one surface to the other, we may consider its length to be  with area given by the cross product:
with area given by the cross product:  . Moreover, since we know that the area of integration is a closed region we see that the integral vanishes (goes to 0). Thus, we may write the difference
. Moreover, since we know that the area of integration is a closed region we see that the integral vanishes (goes to 0). Thus, we may write the difference


 ) vanish and recall Stokes’ theorem
) vanish and recall Stokes’ theorem



 represents the net effect of energy sinks and sources and is called the energy loss function. For simplicity, one typically writes the form of the heat equation to be
represents the net effect of energy sinks and sources and is called the energy loss function. For simplicity, one typically writes the form of the heat equation to be

 represents heat flux by particle conduction,
represents heat flux by particle conduction,  is the net radiation,
is the net radiation,  is the Ohmic dissipation, and
is the Ohmic dissipation, and  represents external heating sources, if any exist. The term
represents external heating sources, if any exist. The term 
 is the thermal conduction tensor.
is the thermal conduction tensor.






 (Ideal Gas Law)
(Ideal Gas Law)


 (i.e. non-relativistic). Finally for incompressible flows we know that
(i.e. non-relativistic). Finally for incompressible flows we know that 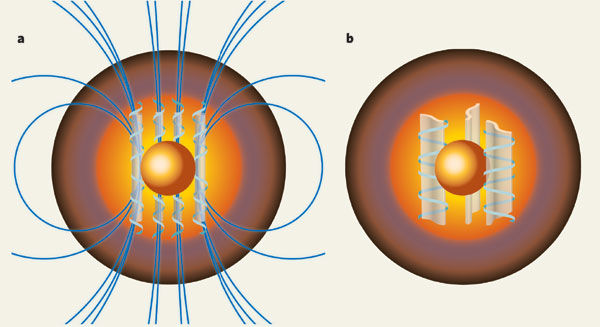
 :
:


 is
is  . Thus, the integral of the mass flux is
. Thus, the integral of the mass flux is





 to be the curl of the fluid velocity:
to be the curl of the fluid velocity:






 . Substitution into the continuity equation yields the following
. Substitution into the continuity equation yields the following
 . Now, since
. Now, since  , this then means that
, this then means that
