
So far in this series I have given the definitions of vectors, scalars, tensors, and manifolds. As a result, much of this series has been mostly mathematics and not necessarily physics. To that end, the purpose of this post is to develop the salient points of special relativity. Namely, the intention of this post is to cover the following:
- Definition of Inertial Reference Frames: Standard Configuration and Einstein’s Postulates.
- Development of the Lorentz Transformation Matrix
- Discussion of the Newtonian geometry of spacetime
- Discussion of the Minkowski geometry of spacetime (i.e. no curvature)
- Finally I will show that the quantity
is invariant with respect to Lorentz transformations. This is a pretty standard problem in most GR textbooks and in fact in some introductory books on SR.
This post is meant as a “quick recap” of the main features of SR and is by no means comprehensive. For more of the finer details, consult the following resources
- Hobson, M.P., Efstathiou G., and Lasenby, A.N., General Relativity: An Introduction for Physicists. 2009. Cambridge University Press. The reference text for this series.
- Misner, Wheeler, & Thorne’s Gravitation. Princeton University Press. 1975. This is probably one of the most comprehensive texts on relativity. It is the book to have if you really want to understand relativity. However, if you prefer a concise writing style, then this book will not be for you (very verbose, but very interesting to read).
- Collier P., A Most Incomprehensible Thing: Notes towards a *very* gentle introduction to mathematics of relativity. 2014. This book is ideal to introduce the foreboding topics of relativity, tensor calculus, and differential geometry. This book takes the reader through a quick primer of the mathematics required to understand the latter topics; from basic equations to multivariable calculus.
Featured Image: Image Credit: Harold White. **I understand that the derived metric describing the contraction and expansion in front and behind of the craft may be inaccurate. I just thought that this would be an interesting concept to think about**
The featured image of this post shows what spacetime would be like if an engine would look like if it were to be created. One of the most well-known ideas in modern physics is that there exists a cosmic speed limit, the speed of light in a vacuum, 
However, such an engine requires an exotic form of matter. Something that is able to be synthesized theoretically yet would be practically insurmountable in cost. For those of you who are interested for more details, the paper that derives the required metrics can be found at:
https://arxiv.org/abs/gr-qc/0009013
Defining an Inertial Reference Frame:
I. Inertial Frames:
Consider a reference frame 
II. Standard Configuration:
Let 

Fig.1 Standard Configuration. Frames 


III. Einstein’s Postulates:
There are two ideas that Einstein assumed when developing his theory of special relativity: the principle of relativity and the constancy of the speed of light. The first of which states that the laws of physics are the same in all inertial reference frames. In a more technical sense, dimensions perpendicular to the direction of motion of a given inertial frame remain unchanged. To be more precise, if we have the two frames 


The other postulate that Einstein put forth was that the speed at which light propagates in a vacuum is invariant. Contrary to Newton, Einstein said that the speed of light remained the same and it was space and time that changed. I will talk more about this when I talk about the Newtonian and Minkowski geometries.
Development of the Lorentz Transformation Matrix:
Consider two inertial frames 





where 

or as

where we have made use of the Einstein summation convention in which it is implied that we sum over repeated indices. The term 

This is the Lorentz transformation matrix. We may also write
Discussion of the Newtonian Geometry of Spacetime:
NOTE: In this section, and in the next section, I will be stating the transformation equations. I will not be deriving them since I believe that this exercise is more enlightening when accomplished independently.
In 1687, at the recommendation of astronomer Edmond Halley, Newton published the first edition of the Principia. In those three volumes, Newton set forth the laws of Nature regarding motion, gravitation, and his independent discovery of calculus (a debated topic that I will not be talking about; however I do acknowledge the tremendous contributions that Leibniz made to the development of modern-day calculus). In the Newtonian realm, space and time are regarded as absolute. As a result, such an absolution requires that the velocity with which an object travels be subject to change. To relate this to relativity, consider the following example:
Suppose my buddy and I (because we were bored and we love physics) decide to measure how long it takes a train car to travel the length of the platform of the train station. Suppose further that I am observing from the platform and my buddy observes from the train. Once the train begins to move we both signal to each other to start our observations. According to Newton, because time and space are absolute, both my buddy and I record the same time. Suppose my reference frame is




These equations constitute the Galilean transformation equations wherein the second equation corresponds to our everyday experience of motion. The time equation here tells us that time remains invariant under such a transformation. The quantities 




We may represent a metric in other coordinate systems as well. A future post will discuss in detail metrics and the metric tensor 
Discussion of the Minkowski Geometry of Spacetime:
The Newtonian geometry of space and time, namely the assumptions of absolute space and absolute time, stood as the prevailing theory for quite some time. That is, until Einstein came along. Einstein’s interpretation of space and time came from taking Maxwell’s equations and deriving the following equations

These are the electromagnetic wave equations in which the wave speed is of the form
![\displaystyle c=\frac{1}{\sqrt[]{\mu_{0}\epsilon_{0}}}, (8)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+c%3D%5Cfrac%7B1%7D%7B%5Csqrt%5B%5D%7B%5Cmu_%7B0%7D%5Cepsilon_%7B0%7D%7D%7D%2C+%288%29&bg=ffffff&fg=333333&s=0&c=20201002)
the speed of light in a vacuum. Einstein saw the speed of light within Maxwell’s equations and postulated that the speed of light is the speed beyond which no object can travel. It was on this and the postulate of relativity that Einstein based his theory of special relativity. At the heart of it all, one can derive (from Eqs.(1)) the Lorentz transformation equations




In these equations, 
![\gamma \equiv 1/\sqrt[]{1-\alpha}](https://s0.wp.com/latex.php?latex=%5Cgamma+%5Cequiv+1%2F%5Csqrt%5B%5D%7B1-%5Calpha%7D&bg=ffffff&fg=333333&s=0&c=20201002)

Upon comparison of the two types of transformation equations (i.e. the Galilean and Lorentz equations) one sees that in the former space and time can be shown to be two entirely different constructs. While the latter shows that space and time must be considered as a unified entity. The problem below shows that (see below) that the interval

remains invariant under a Lorentz transformation. In this case, the metric tensor
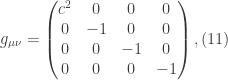
From this it follows that the interval may be written as

I will discuss this further in a future post. Since the components of the metric tensor are of this form, we may refer to this space as Minkowskian or flat space.
Problems on Invariance under Transformations:
A typical problem that is covered in most relativity texts is to show that the interval remains invariant under a Lorentz transformation. The following is my solution to the problem. I highly encourage working through the problem on your own before seeking guidance and furthermore, I strongly recommend that you complete the problem prior to reading my solution.
Let us consider the interval

where I am assuming standard configuration of inertial frames and transforming from the

where the last two components (the y and z components) remain the same automatically by the principle of relativity and hence vanish from the equation. Applying a Lorentz transformation, we get
![\displaystyle \delta s^{\prime 2}= [\gamma(ct_{B}-\alpha x_{B})-\gamma(ct_{A}-\alpha x_{A})]^{2}-[\gamma(x_{B}-\alpha c t_{B})-\gamma(x_{A}-\alpha c t_{A}]^{2}. (15)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cdelta+s%5E%7B%5Cprime+2%7D%3D+%5B%5Cgamma%28ct_%7BB%7D-%5Calpha+x_%7BB%7D%29-%5Cgamma%28ct_%7BA%7D-%5Calpha+x_%7BA%7D%29%5D%5E%7B2%7D-%5B%5Cgamma%28x_%7BB%7D-%5Calpha+c+t_%7BB%7D%29-%5Cgamma%28x_%7BA%7D-%5Calpha+c+t_%7BA%7D%5D%5E%7B2%7D.+%2815%29&bg=ffffff&fg=333333&s=0&c=20201002)
After some algebra, we end up with

In the algebraic steps implied here, we end up with space and time terms as measured in the unprimed inertial frame

Hence we see that the interval remains invariant under a Lorentz transformation. Minkowski was the one who noticed first that the Lorentz transformation equations show that space and time cannot be considered separately. This idea of spacetime as a four-dimensional entity (manifold, really) with no curvature is referred to as Minkowskian spacetime. It is also known mathematically as being pseudo-Euclidean.
Most of this post was my own understanding of special relativity augmented by the references listed above. The problem solved in the final section was obtained from [1]. I have not covered topics such as relativistic kinetic energy, time dilation, relativistic addition of velocities, relativistic momentum, length contraction, and the twin paradox. Depending on how this post does, I may work on a follow-up post on these topics. As mentioned above, I will be posting something about the metric tensor and more on interval equations using index notation. I am unsure as to when that will be up, but I will do my best to find time. If there are any errors or if my reasoning does not hold up anywhere, leave a comment and let me know and I’ll correct it.
Clear Skies!
